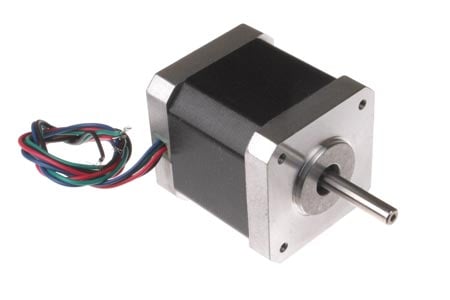
This pancake bipolar stepping motor from Sanyo has a 1.8° step angle (200 steps/revolution). Each phase draws 1 A at 4.5 V, allowing for a holding torque of 1 kg-cm (14 oz-in). The motor has four color-coded wires terminated with bare leads: red and yellow connect to one coil; orange and blue connect to the other. It can be controlled by a pair of suitable H-bridges (one for each coil), but we recommend using a bipolar stepper motor driver or one of our Tic Stepper Motor Controllers. In particular, the Tics make control easy because they support six different interfaces (USB, TTL serial, I²C, RC, analog voltages, and quadrature encoder) and are configurable over USB with our free configuration utility.
Our 5 mm universal mounting hub can be used to mount objects on the stepper motor’s 5 mm-diameter output shaft.
Specifications
Size: 50 mm square × 11 mm, not including the shaft
Weight: 90 g (3.2 oz)
Shaft diameter: 5 mm
Steps per revolution: 200
Current rating: 1 A per coil
Voltage rating: 4.5 V
Resistance: 4.5 Ω per coil
Holding torque: 1 kg-cm (14 oz-in)
Inductance: 2 mH per coil
Lead length: 30 cm (12″)
Output shaft supported by two ball bearings
More specifications are available in the datasheet (352k pdf).
Dimensions
The following diagram shows the stepper motor dimensions in mm. The dimension labeled “L” is 11 mm. Though the dimension diagram below shows output shafts on both sides, this stepper motor only has a single output shaft (on the side with the mounting plate) with a length of 5 mm and a diameter of 5 mm. This shaft works with our 5 mm universal mounting hub.

https://forum.arduino.cc/index.php?topic=339184.120
https://oyostepper520.seesaa.net/article/471258859.html?1572515035
Our 5 mm universal mounting hub can be used to mount objects on the stepper motor’s 5 mm-diameter output shaft.
Specifications
Size: 50 mm square × 11 mm, not including the shaft
Weight: 90 g (3.2 oz)
Shaft diameter: 5 mm
Steps per revolution: 200
Current rating: 1 A per coil
Voltage rating: 4.5 V
Resistance: 4.5 Ω per coil
Holding torque: 1 kg-cm (14 oz-in)
Inductance: 2 mH per coil
Lead length: 30 cm (12″)
Output shaft supported by two ball bearings
More specifications are available in the datasheet (352k pdf).
Dimensions
The following diagram shows the stepper motor dimensions in mm. The dimension labeled “L” is 11 mm. Though the dimension diagram below shows output shafts on both sides, this stepper motor only has a single output shaft (on the side with the mounting plate) with a length of 5 mm and a diameter of 5 mm. This shaft works with our 5 mm universal mounting hub.

https://forum.arduino.cc/index.php?topic=339184.120
https://oyostepper520.seesaa.net/article/471258859.html?1572515035